有界変動関数とは,「変動」つまり上下にどのくらい動くかが,「有界」すなわちそんなに変動しないということです。有界変動関数は,2つの単調増加関数の差で表すことができることが知られています。
有界変動関数について,その定義と,大事な性質を証明付きで紹介していきましょう。
有界変動関数の定義
定義(全変動・有界変動関数)
f\colon [a,b]\to \R を関数とする。さらに,分割を
\small P=\{ \{x_i\}\mid n\ge 1,\, a=x_0<x_1<\dots <x_n=b\}
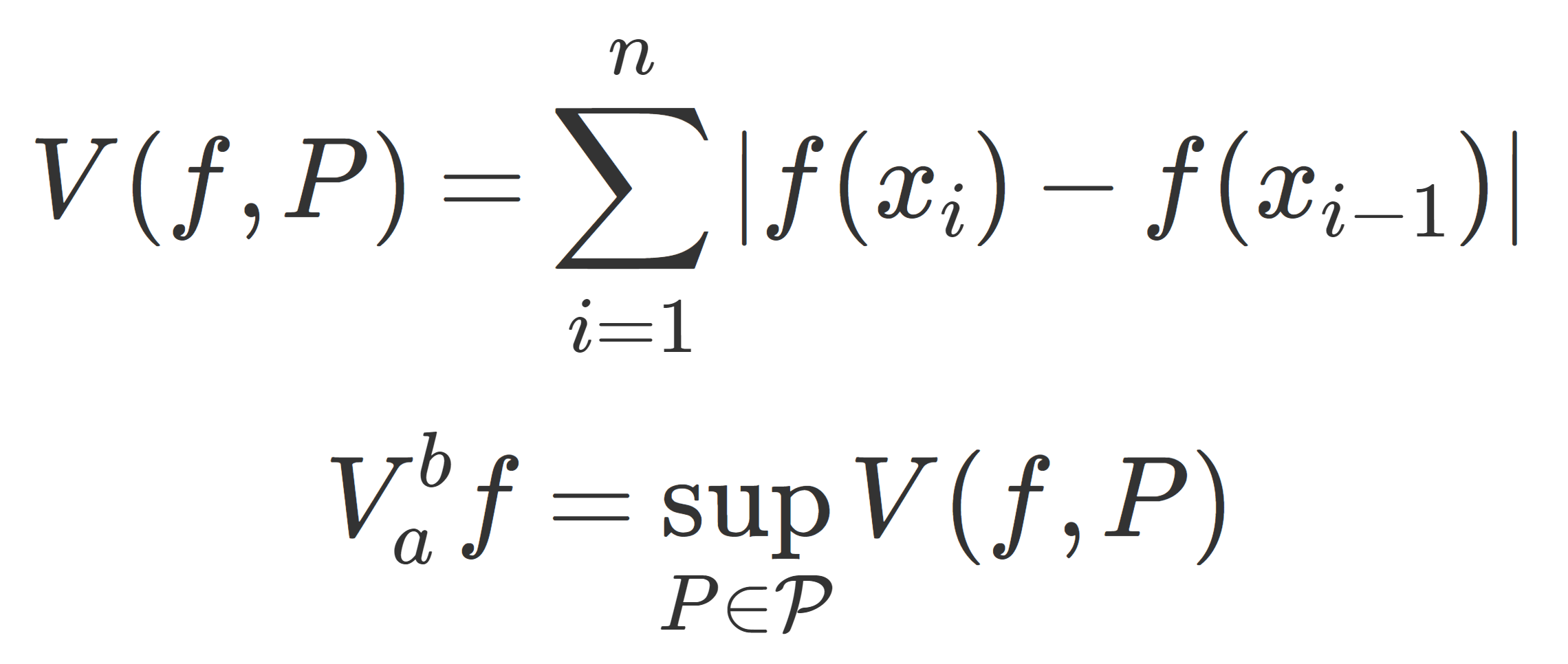
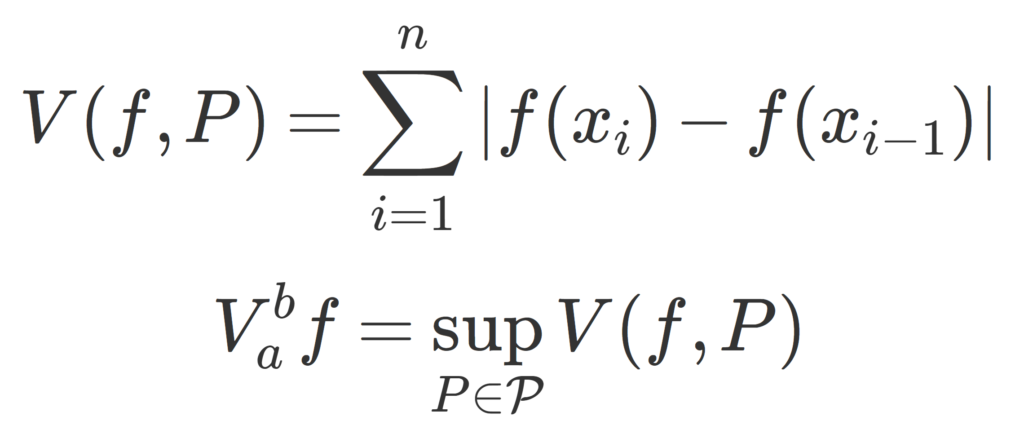
とする。分割 P における f の変動 (変分; variation) を
\large V(f, P) = \sum_{i=1}^{n} |f(x_{i})-f(x_{i-1})|
で定義する。分割 P 全体の集合を \mathcal{P} としたとき,
\color{red}\large V_a^bf=\sup_{P\in\mathcal{P}} V(f,P)
を f の全変動 (total variation) という。 \large \color{red} V_a^b f<\infty となるとき,f を有界変動関数 (function of bounded variation) という。
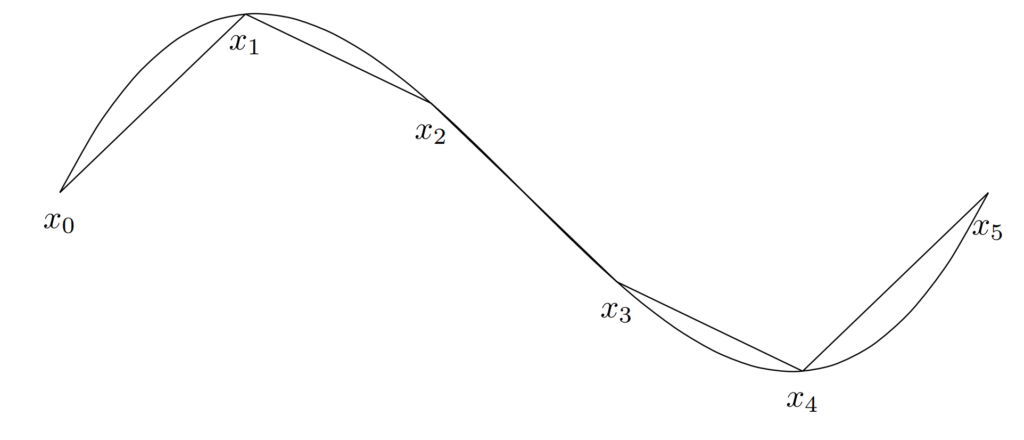
分割 P における変動は, \sum_{i=1}^{n} |f(x_{i})-f(x_{i-1})| の形をしていますから,以下のように,上下にどれだけ動いたかの和になります。
分割を変えて,その上限(sup)を取ると言っています。絶対値に関する三角不等式から,分割は細かければ細かいほど変動は大きくなります。よって全変動とは,関数自体がどれだけ上下するかを表しているといえます。有界変動関数とは,めちゃくちゃ上下するわけではないよ,ということです。
例を見た方が早いと思うので,見ていきましょう。
有界変動関数の例・そうでない例
有界変動関数の例
f \colon [a,b]\to\R が広義単調増加関数のとき,有界変動である。
同様に,区分的に単調関数(すなわちある a=x_0<x_1<\dots <x_n=b が存在して,各 [x_{i-1}, x_i] 上単調関数)のとき,有界変動である。
単調であれば連続でなくて構いません。たとえば,床関数 f(x)=\lfloor x\rfloor は a\le x\le b で広義単調増加なため,有界変動です。また, f が単調のとき, V_a^b f = |f(b)-f(a)| となります。実際, f が単調増加なら,
\begin{aligned}V_a^b f &=\sum_{i=1}^n |f(x_i)-f(x_{i-1})| \\ &= \sum_{i=1}^n (f(x_i)-f(x_{i-1})) \\ &=f(b)-f(a) \end{aligned}
となりますね。単調減少でも同様です。
有界変動関数でない例1
f\colon [0,1]\to \R を f(x)=\begin{cases} 1/x & 0<x\le 1, \\ 0 & x=0\end{cases} とすると,これは有界変動関数でない。
0<s<1 に対し, V_a^b f\ge |f(s)-f(0)|=1/s \xrightarrow{s\to\infty} \infty から分かります。この例は,関数が有界でない例です。
有界変動関数でない例2
f\colon [0,1]\to \R を f=1_{\mathbb{Q}} = \begin{cases} 1 & x\in \mathbb{Q}\cap [0,1] , \\ 0 & \text{otherwise} \end{cases} と定めると,これは有界関数だが,有界変動関数でない。
ディリクレ関数ですね。ディリクレ関数の定義と性質5つで詳しく解説しています。
関数としては有界ですが,無数に 0 に行ったり 1 に行ったりすることから,有界変動ではないです。
有界変動関数でない例3
f\colon [0,1]\to \R を
f(x)=\begin{cases} x\sin (1/x)& x\ne 0,\\ 0 & x=0\end{cases}
で定めると,これは連続関数であるが有界変動関数ではない。
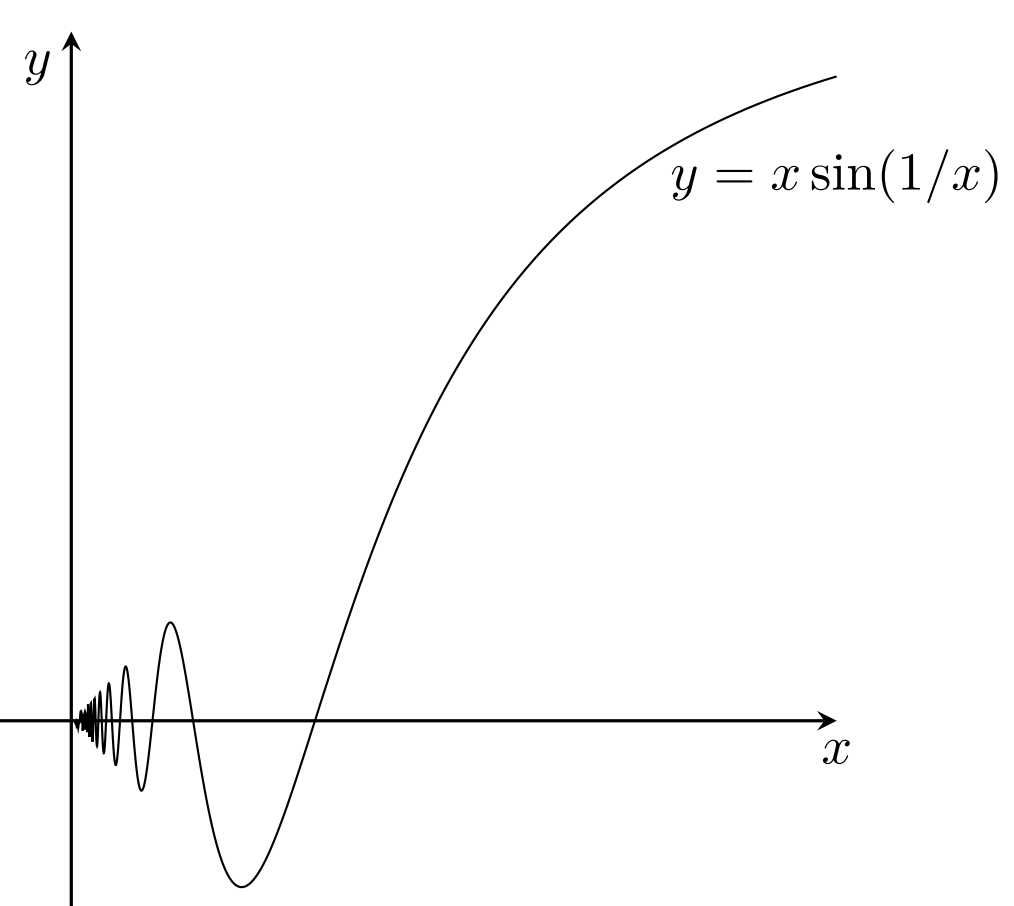
実際, 1\le k\le n に対し, t_k=\frac{2}{(2k+1)\pi} とすると,
\begin{aligned}& |f(t_{k+1})-f(t_k)| = t_{K+1}+t_k \\&\ge 2t_{k+1} \ge \frac{4}{3\pi(k+1)}\end{aligned}
であり,\sum_{k=1}^n \frac{4}{3\pi(k+1)}\xrightarrow{n\to\infty} \infty となるため,有界変動関数ではありません。めちゃくちゃ上下に振動しまくることからも,有界変動でないことは想像できるでしょう。
有界変動関数の大事な性質
1. 有界変動関数の基本的性質
定理1(有界変動関数の基本的性質)
f,g\colon [a,b]\to \R を有界変動関数とする。さらに c\in \R, \|f\|_\infty = \sup_{x\in [a,b]} |f(x)| とする。このとき,
- \color{red} \|f\|_\infty \le |f(a)|+V_a^b f 特に f は有界である。
- V_a^b f=0 \iff f は定数関数
- \color{red}V_a^b (f+g)\le V_a^b f +V_a^b g 特に, f,g が有界変動ならば, f+g も有界変動である。
- \color{red} V_a^b (cf) = |c|V_a^b f である。特に, f が有界変動ならば, cf も有界変動である。
- V_a^b(fg)\le \|f\|_\infty V_a^b g +\|g\|_\infty V_a^b f
- V_a^b|f|\le V_a^b f
- V_a^b f=V_a^c f+V_c^b f,\; a<c<b
- f が C^1 級であるとき, V_a^b f=\int_a^b|f'(t)|\, dt
証明
1. \|f\|_\infty \le |f(a)|+V_a^b f について 任意の a\le x\le b に対して,
\begin{aligned}|f(x)|&\le |f(a)|+|f(x)-f(a)| \\&\le |f(a)|+V_a^b f \end{aligned}
である。したがって, \|f\|_\infty \le |f(a)|+V_a^b f である。
2,3,4.はほぼ明らかなので省略する。
5. V_a^b(fg)\le \|f\|_\infty V_a^b g +\|g\|_\infty V_a^b f について
\begin{aligned}&|f(x_i)g(x_i)-f(x_{i-1})g(x_{i-1})| \\&\le |f(x_i)||g(x_i)-g(x_{i-1})| \\&\quad \qquad+|g(x_{i-1})||f(x_i)-f(x_{i-1})| \\ &\le \|f\|_\infty |g(x_i)-g(x_{i-1})| \\&\quad\qquad +\|g\|_\infty |f(x_i)-f(x_{i-1})| \end{aligned}
である。分割を細かくとると, V_a^b(fg)\le \|f\|_\infty V_a^b g +\|g\|_\infty V_a^b f である。
6,7.もほぼ明らかなため省略する。
8. V_a^b f=\int_a^b|f'(t)|\, dt について 各分割 P に対し,平均値の定理より,
V(f, P) = (x_i-x_{i-1}) |f'(t_{i})|,\quad x_{i-1} \le t_i\le x_i
とできる。 f' は連続であるため,リーマン積分の定義より,分割を細かくすると,右辺は \int_a^b |f'(t)|\, dt に収束する。よって示された。
証明終
2. 有界変動関数は単調増加関数の差にかける
定理2(ジョルダンの定理; Jordan’s theorem)
f\colon [a,b]\to\R が有界変動関数である必要十分条件は, f が広義単調増加関数の差にかけることである。
さらに, f を有界変動関数とするとき,広義単調増加関数 p, n\colon [a,b]\to\R であって,
- p(a)=n(a)=0
- f(x)-f(a)= p(x)-n(x),\quad x\in [a,b]
- V_a^x f =p(x)+n(x),\quad x\in [a,b]
をみたすものが一意的に存在する。
証明
広義単調増加関数自体は有界変動関数であるから,「広義単調増加関数の差でかける \implies 有界変動関数である」はよい。逆を示そう。
a\le x\le b に対し, v(x)=V_a^x f とする。さらに,
\begin{aligned} p(x)&= \frac{1}{2}\{ v(x)+f(x)-f(a)\} , \\ n(x)&= \frac{1}{2} \{ v(x)-f(x)+f(a)\} \end{aligned}
と定める。このとき,1,2,3.は明らかである。 a\le x<y\le b とすると,
\begin{aligned} &2\{ p(y)-p(x)\} \\ &= v(y)-v(x)+f(y)-f(x)\\ &= V_x^y f +f(y)-f(x) \\ &\ge |f(y)-f(x)|+f(y)-f(x) \\ &\ge 0 \end{aligned}
より,p は広義単調増加である。同様の議論により,n も広義単調増加だとわかる。一意性は,2.3を同時にみたす p, n は明らかに一意なのでよい。
証明終
定理2より,以下の定理3が従います。
3. 有界変動関数はほとんどいたるところ連続・微分可能
定理3(有界変動関数はほとんどいたるところ連続・微分可能)
有界変動関数は高々可算個の点を除いて連続である。また,ほとんどいたるところ微分可能である。
これは,有界変動関数が単調関数の差にかけることと,単調関数は高々可算個の点を除いて連続で,ほとんどいたるところ微分可能であることから,直ちに従います。
単調関数が高々可算個の点を除いて連続であることは以下で解説しています。
単調関数がほとんどいたるところ微分可能であることは以下で解説しています。
4. 有界変動関数の空間はバナッハ空間
以下では,有界変動関数 f\colon [a,b]\to\R 全体の集合を \color{red}BV[a,b] と表すことにします。
定理4(有界変動関数の空間)
BV[a,b] は
\large \color{red} \|f\|_{BV} = |f(a)|+ V_a^b f
により,バナッハ空間になる。さらにいえば,バナッハ代数(バナッハ環)になる。
単に \|f\|= V_a^b f と定義すると,これはセミノルムにしかなりません。実際, V_a^b (f-g)=0 のとき,定理1の2.より f-g は定数といえますが,f=g とまでは言えません。
証明
定理1より, \|f\|_{BV} がノルムであることは良い。完備性を示そう。 \{ f_n\} を \|\cdot \|_{BV} におけるコーシー列とする。
定理1の1.より, \{f_n\} は一様収束位相に関してもコーシー列である。有界関数に一様収束位相を入れた空間 B[a,b] は完備なため, \{f_n\} はある関数 f \in B[a,b] に一様収束する。
\varepsilon >0 とする。このとき,ある N\ge 1 が存在して,m,n \ge N\implies \|f_m-f_n\|_{BV}\le \varepsilon とできる。 P を [a,b] の分割とする。このとき, n\ge N に対し,
\begin{aligned} &|f(a)-f_n(a)| +V(f-f_n, P) \\ &=\lim_{m\to\infty} \{ |f_m(a)-f_n(a)| +V(f_m-f_n, P)\} \\ &\le \sup_{m\ge N} \|f_m-f_n\|_{BV} \le \varepsilon \end{aligned}
となる。分割を細かくすることで, \|f-f_n\|_{BV}\le \varepsilon が従い,特に f\in BV[a,b] である。さらに, \lim_{n\to\infty} \|f-f_n\|_{BV} =0 となるため,完備性は示せた。
最後に,バナッハ代数であることを示す。 f_1,f_2\in BV[a,b] に対し, \|f_1f_2\|_{BV}\le \|f_1\|_{BV}\|f_2\|_{BV} を示せばよい。定理2を利用して,
\begin{aligned} f_1&=p_1-n_1+f_1(a), \\ f_2&= p_2-n_2+f_2(a) \end{aligned}
とする。このとき, \|f_1\|_{BV}= p_1(b)+n_1(b)+|f_1(a)| であり, \|f_2\|_{BV} も同様である。また,
f_1f_2=(p_1-n_1+|f_1(a)|)(p_2-n_2+|f_2(a)|)
であり,右辺を展開して,定理1の3.を用いて,かつ V_a^b(p_1p_2)=p_1(b)p_2(b) などを利用すれば,題意は示される(ただの面倒な計算なので省略)。
証明終
その他の重要な話
f が有界変動関数のとき, g を連続関数として,
\begin{aligned}\int g\, df=\sup_{P\in\mathcal{P}} \sum_{i=1}^n g(c_i)( f(x_i)-f(x_{i-1})),& \\ x_{i-1}\le c_i\le x_i & \end{aligned}
が定義でき,これをリーマン・スティルチェス積分 (Riemann–Stieltjes integral) といいます。リーマン・スティルチェス積分は,また別の記事で紹介しましょう。
関連する記事